1.2 The Geometry of the Universe
In this section and the next we will investigate
the theory of the expanding Universe. There are two elements to this:
- What
is the large-scale structure of space? ("Geometry")
- How
and why does that structure change with time? ("Dynamics")
The first may seem an unlikely problem -- how can empty space have any kind
of structure? But it was realised in the 19th century that the traditional
geometry of
Over the last century, GR has passed many tests
against observations, giving us confidence that it gives an accurate
description of how the dynamics of the Universe are controlled by the
energy-momentum of its contents. But the best evidence for GR is on the
relatively small scales of individual stars, as we saw in the section of this
course on pulsars, and also on smaller scales still in Earth-bound
laboratories. There are a number of speculative theories according to which GR
breaks down on cosmological scales. So it is worth making a distinction between
cosmological results that rely on the dynamics supplied by GR (the subject of
the next section), and those results that rely purely on geometry.
1.2.1 Non-Euclidean Geometry
Euclid's Elements was the
most successful textbook in history. Written around 300 BC, it was still the
basic school text on geometry in the 19th century. Even today, school geometry
follows
But in the 19th century mathematicians including C. F. Gauss and G. B. Riemann showed
that alternative postulates could lead to equally self-consistent geometries.
Gauss realised that the geometry of the real world could only be determined by
observation. Because Euclidean geometry does work for surveying with good
accuracy, the real world must be close to Euclidean on this scale; but most
non-Euclidean geometries become approximately Euclidean when figures
(triangles, circles etc.) are small compared to some characteristic length. As
Gauss recognised, our experience on Earth is no guide to the geometry of the
Universe as a whole.
1.2.2 Positive Curvature
As the Earth is a sphere, one of the earliest
applications of geometry was to the properties of figures drawn on a sphere.
This is called spherical geometry. For more than two thousand years
spherical geometry was studied as a set of results in 3-D Euclidean geometry;
but in 1854, Riemann realised that we can also describe it as analogous to the
2-D Euclidean geometry of a plane, but with the points related to each other in
a different (non-Euclidean) way. From Riemann's point of view, there is no need
for a 3-D space in which the sphere is embedded; attention is confined solely
to the points on the surface and the way they are "connected".
Let us look at the geometry of the sphere more
closely (from now we will follow the convention in geometry according to which
"sphere" means just the surface, not the solid object). We know that
the shortest distance between two points on a sphere is along a great circle.
But a straight line is defined as the shortest distance between two points, so
great circles become the "straight lines" of the non-Euclidean
geometry of the sphere. Since any two great circles will always intersect, in
this geometry there are no parallel lines, violating ![]() R0,
where R0 is the radius of the sphere and
R0,
where R0 is the radius of the sphere and ![]() is
measured in radians. But the circumference of the circle is not 2
is
measured in radians. But the circumference of the circle is not 2![]() x
as in Euclidean geometry but the smaller value 2
x
as in Euclidean geometry but the smaller value 2![]() R0sin
R0sin![]() = 2
= 2![]() R0sin(x/R0).
By replacing
R0sin(x/R0).
By replacing ![]() radians;
while in spherical geometry the angles always add to >
radians;
while in spherical geometry the angles always add to > ![]() (Fig 1.2b).
(Fig 1.2b).
|
Figure 1.2: Spherical geometry: (a) The
radius of a small circle subtends an angle |
![\begin{picture}(12,6.3)
% put(0,0)\{ framebox(12,6.3)\{ \}\}
\put(0,0){\includegraphics*[width=12cm]{sphergeom.eps}}
\end{picture}](node3_files/image003.gif)
All points on a sphere are equivalent, and there
is no preferred direction, so the geometry of this 2-D "space" is
homogeneous and isotropic. It is common to say that this space is curved, in
contrast to "flat" Euclidean 2-D space. This is a rather misleading description,
but we are stuck with it. By convention the curvature is "positive";
we will meet the alternative, negatively curved space, in the next section.
Thinking of a sphere as a 2-D space is a useful
analogy, but in reality space is three dimensional. What would positive
curvature mean for a 3-D space? Simply, that the properties of triangles and
circles are exactly the same as in 2-D curved space (they are still plane
figures, after all). In 3-D there are infinitely many planes, separated
vertically and at different angles (Fig. 1.3);
but if space is homogeneous and isotropic, the properties of figures cannot
depend on their position or orientation.
![\begin{picture}(12,6.5)
% put(0,0)\{ framebox(12,6.5)\{ \}\}
\put(0,0){\includegraphics*[width=12cm]{2Dvs3D.eps}}
\end{picture}](node3_files/image004.gif)
In 3-D the locus of points a given distance (say x)
from a fixed point is a sphere. We can think of this as being built up of
circles with every possible orientation, all centred on the fixed point and
with radius x. By isotropy, all these circles have the same
circumference, so the geometry on the sphere in our curved 3-D space is exactly
the same as on a sphere embedded in Euclidean 3-D space, with one exception:
the radius of curvature is not x but
![]() .
.
That is, a great circle on the sphere has circumference 2![]() rA,
the area of the sphere is 4
rA,
the area of the sphere is 4![]() rA2,
and the distance between two points on the sphere separated by
rA2,
and the distance between two points on the sphere separated by ![]() radians (as seen from
the centre) is rA
radians (as seen from
the centre) is rA![]() .
.
1.2.3 Negative Curvature
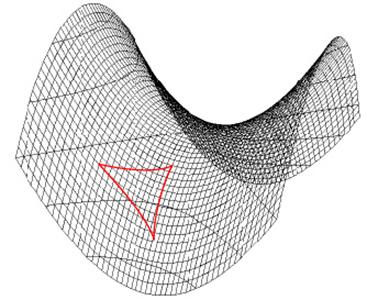
Fig. 1.4 shows a kind of curved surface that
is fundamentally different from the surface of a sphere. Using the straightest
possible lines on the surface (shortest distance between two points, as ever),
we can draw a triangle, for instance, as shown in the figure. It is clear that
the three angles will add to less than ![]() ;
similarly a circle on this surface will have a circumference > 2
;
similarly a circle on this surface will have a circumference > 2![]() x.
The surface is distorted from a flat plane in the opposite way to the surface
of a sphere, so we say it has negative curvature. On the surface shown
in the diagram, the curvature changes from point to point. We would have
preferred to show the negatively curved equivalent of a sphere, a
"pseudosphere" which has constant negative curvature at each point.
Unfortunately it is impossible to construct a 2-D pseudosphere in 3-D flat space,
unlike the case for a sphere (it is possible in 4-D flat space, but we can't
visualise that!). But this does not prevent us from working out its geometry;
in fact this was the first non-Euclidean geometry to be discovered.
x.
The surface is distorted from a flat plane in the opposite way to the surface
of a sphere, so we say it has negative curvature. On the surface shown
in the diagram, the curvature changes from point to point. We would have
preferred to show the negatively curved equivalent of a sphere, a
"pseudosphere" which has constant negative curvature at each point.
Unfortunately it is impossible to construct a 2-D pseudosphere in 3-D flat space,
unlike the case for a sphere (it is possible in 4-D flat space, but we can't
visualise that!). But this does not prevent us from working out its geometry;
in fact this was the first non-Euclidean geometry to be discovered.
On a pseudosphere, the circumference of a circle
with radius x is
![]()
|
|
|
Figure 1.4: A saddle - an example of a
negatively curved surface. |
where sinh is the hyperbolic sine. We call R0 the radius
of curvature of the pseudosphere. Whereas sin![]() is always smaller than
is always smaller than ![]() (measured,
as always, in radians), sinh
(measured,
as always, in radians), sinh![]() is always greater, so rA > x, as we found in
Fig. 1.4. Unlike a sphere, a pseudosphere
extends to infinity in all directions. In this case there are an infinite
number of "straight lines" passing through a given point that will
never intersect a given line, rather than just one parallel.
is always greater, so rA > x, as we found in
Fig. 1.4. Unlike a sphere, a pseudosphere
extends to infinity in all directions. In this case there are an infinite
number of "straight lines" passing through a given point that will
never intersect a given line, rather than just one parallel.
Just as for
positive curvature, there is a possibility that our 3-D space is really
negatively curved, and the details of the geometry carry over from the 2-D case
in the same way.
1.2.4 Flat space
If R0 becomes very large, then ![]() = x/R0 becomes very small, in which
case both sin
= x/R0 becomes very small, in which
case both sin![]() and sinh
and sinh![]() are well approximated by
are well approximated by ![]() . In the limit of infinite R0, the radius
of curvature of a sphere tends to the actual radius: rA = x.
This means that Euclidean geometry is a limiting case of the other two. By the
same token, when we are dealing with lengths x small compared to R0,
geometry will be effectively Euclidean as we claimed at the beginning. Because
a space with Euclidean geometry shows neither positive nor negative curvature
is often called flat space.
. In the limit of infinite R0, the radius
of curvature of a sphere tends to the actual radius: rA = x.
This means that Euclidean geometry is a limiting case of the other two. By the
same token, when we are dealing with lengths x small compared to R0,
geometry will be effectively Euclidean as we claimed at the beginning. Because
a space with Euclidean geometry shows neither positive nor negative curvature
is often called flat space.
It is often useful to talk about all three
geometries simultaneously. To do this we use the symbol Sk(![]() ) to stand for all three cases,
according to the value of the curvature constant k, as follows:
) to stand for all three cases,
according to the value of the curvature constant k, as follows:
|
k |
Curvature |
Sk( |
|
|
-1 |
negative |
S-1( |
= sinh |
|
0 |
zero |
S0( |
= |
|
+1 |
positive |
S+1( |
= sin |
It is awkward to use a formally infinite R0
to describe flat space, and we can avoid doing so if we use the Sk
notation, because then we can pick any value of R0,
and it will cancel out:
![]() .
.
So we can leave R0 in the equations without any ill effects.
1.2.5 Topologies
We have carefully avoided mentioning the most obvious difference between a sphere and a flat plane: on a sphere, if you travel far enough in a "straight line" you will arrive back where you started. This tells us that, taken as a whole, points on the sphere are linked in a fundamentally different way from points on a plane. These large-scale connections would remain if the sphere was distorted, e.g. sat on, stretched into a rugby ball, or just heavily dented; on the other hand the lengths of circles drawn on the surface would certainly be changed. The large-scale connections define the topology of the surface (sometimes called "rubber-sheet" geometry because topology is unaffected by stretching or squashing the surface). In contrast, geometry, strictly speaking, is concerned with the actual lengths and angles, and not with large-scale connections.
|
|
|
Figure 1.5: A torus embedded in 3-D space. |

We say that the topology of a sphere is closed,
meaning that it has a finite surface area, but no edges. The topology of a
pseudosphere (or a flat plane) is open, meaning that it extends
infinitely in all directions. This suggests that there is a necessary
connection between geometry and topology, but this is not correct. For
instance, Euclidean geometry also applies on the surface of a cylinder, in the
sense that circles have radius exactly 2![]() r
etc.; but the topology is different because straight lines in one particular
direction return to their starting point. This illustrates an important point:
if we compare the properties of any two small regions of a cylinder they are
the same and independent of direction, so we say that locally the
cylinder is homogeneous and isotropic. But topologically, the direction along
the cylinder behaves very differently from the direction around it, so we say
that globally the cylinder is anisotropic (though still homogeneous).
r
etc.; but the topology is different because straight lines in one particular
direction return to their starting point. This illustrates an important point:
if we compare the properties of any two small regions of a cylinder they are
the same and independent of direction, so we say that locally the
cylinder is homogeneous and isotropic. But topologically, the direction along
the cylinder behaves very differently from the direction around it, so we say
that globally the cylinder is anisotropic (though still homogeneous).
Many other
topologies are consistent with Euclidean geometry, including completely closed
ones. The simplest closed Euclidean geometry is a torus, generated by
connecting together the two ends of a segment of a cylinder. Unlike a cylinder,
a 2-D torus embedded in 3-D space (e.g. Fig. 1.5)
cannot have a strictly Euclidean geometry, but, as for a pseudosphere, this is
an accident which does not affect the self-consistency of the geometry. In this
case it is quite easy to visualise what is going on. A classic example of a 2-D
Euclidean torus is the space of video games such as Asteroids
(Applet 1.6),
where objects leaving the screen on one edge return through the opposite edge.
Notice that the "edges" only appear because we have to cut the torus
to unroll it onto a flat plane; they are not special places as far as
inhabitants of the game are concerned.
|
Figure 1.6: The classic video game
"Asteroids" takes place in a torus projected onto flat 2-D space.
Try playing this
Java version of "Asteroids" written by Mike Hall
(www.brainjar.com). |
Another way of visualising a 2-D torus is to
divide an infinite plane up into a repeating pattern, as shown in Fig. 1.7.
There are only two people in this universe, but the connections of the torus
make it seem to be populated by a large crowd. We have outlined the basic
repeating pattern with two (equally valid) centres. This gives a clue as to how
to construct more complicated closed topologies with Euclidean geometry: simply
divide up the plane into other repeating patterns, such as diamonds.
![\begin{picture}(12,7)
% put(0,0)\{ framebox(12,7)\{ \}\}
\put(0,0){\includegraphics*[width=12cm]{grid.eps}}
\end{picture}](node3_files/image024.gif)
|
1. Convince
yourself that a repeating pattern like that in Fig. 1.7, except with a diamond instead of a rectangular
basic unit, would be caused if a cylinder was twisted by 180o around its axis before joining the two ends. Answers to question are at end
of this document. |
Three dimensional spaces can have closed
topologies in just the same way as 2-D spaces. The first person to realise this
was G. B. Riemann, who suggested in 1854 that our Universe might be a spherical
space (also known as a hypersphere), i.e. a 3-D space with constant
positive curvature and the topology of a sphere (return to starting point after
travelling a distance of 2![]() R0
in any direction). This avoided the classical difficulties of imagining a space
which was either infinite, or had some sort of edge.
R0
in any direction). This avoided the classical difficulties of imagining a space
which was either infinite, or had some sort of edge.
In positively curved space we saw that the area of
a sphere of radius x around any point is 4![]() (R0sin(x/R0))2.
In a spherical space we can travel to x =
(R0sin(x/R0))2.
In a spherical space we can travel to x = ![]() R0,
where the sphere shrinks to a single point, the antipode, the most
distant point from our starting-place. In other words, travelling a distance
R0,
where the sphere shrinks to a single point, the antipode, the most
distant point from our starting-place. In other words, travelling a distance ![]() R0
in any direction takes us to the same place. An alternate topology is so-called
elliptical space. Here, when we travel to x =
R0
in any direction takes us to the same place. An alternate topology is so-called
elliptical space. Here, when we travel to x = ![]() R0/2,
we find that we have reached the same point as if we had set out in the
opposite direction, and so we return to the start after only travelling
R0/2,
we find that we have reached the same point as if we had set out in the
opposite direction, and so we return to the start after only travelling ![]() R0.
An elliptical space has only half the volume of a spherical space with the same
radius.
R0.
An elliptical space has only half the volume of a spherical space with the same
radius.
There are only four combinations of topology and
geometry which are globally isotropic. These are: infinite Euclidean space and
infinite negatively curved space, both open; and spherical and elliptical
space, both positively curved and closed. But there are an infinity of
possibilities, analogous to the 2-D torus, if we include spaces which are only
locally isotropic. For instance the 3-torus is a closed Euclidean space
constructed by joining opposing faces of a cube. Closed spaces with negative
and positive curvature can be constructed by connecting opposite faces of other
polyhedra; these are sometimes called compact spaces. If our Universe is
a closed or compact space, light may be able to travel around it several times,
so that distant galaxies are actually repeat images of nearer ones, just as the
man and woman in Fig. 1.7
see themselves surrounded by a large crowd who are in fact themselves.
Except for flat space, the size of each compact
space must have a definite relation to the radius of curvature R0.
The smallest compact space with negative curvature, Weeks space, is made by
identifying the faces of an 18-sided polyhedron. It has a volume of 0.94R03.
More complex connections give spaces with larger volumes. In contrast, compact
positively curved spaces get smaller as the complexity increases, so that the
largest possible space with constant positive curvature is a spherical space,
which has a volume of 2![]() R03. There is no way to make an
infinite space with constant positive curvature.
R03. There is no way to make an
infinite space with constant positive curvature.
1.2.6 From space to space-time
So far we have talked only about 3-D space. What about time, the fourth dimension? Einstein's Special theory of relativity (SR) shows that space and time are exchangeable to a certain extent: two events which happen at the same time but in different places according to one observer may happen at different times according to another observer moving past at high speed. This concept is incorporated into GR.
Now we have an apparent problem. The universe is
homogeneous and also expanding; homogeneity means, among other things, that the
density r is independent of position, while of course expansion
means that it changes with time. But relativity theory allows us to change our
coordinate system so that events which were previously at different times are
now regarded as simultaneous; in which case we have r varying
with position (and also direction, breaking isotropy as well).
The solution is that homogeneity and isotropy are
only visible to a special set of observers, the fundamental observers (FOs) who
"go with the flow". When we talk about time in cosmology, we mean time
as measured by the FOs. Despite the propaganda of relativity theory that all
observers are equal, the fundamental observers are more equal than the rest:
anyone who presumes to move relative to them will get a distorted view of the
universe in which the observer's direction of motion relative to the
fundamental observers will pick out a special direction in space.
Let's look at this in more detail. Lost in the
wastes of four dimensional space-time, we orient ourselves by labelling each
space-time point (event) by the local density of matter. If density
changes smoothly, we have divided space-time into a sheaf of
"slices", each a 3-D space with constant density. To say that space
is homogeneous and isotropic is to say that all these slices are homogeneous and
isotropic. Since every event is on one or another slice, the slices must pack
together perfectly. This is only possible1.1if they all
share the same geometry -- for instance it's obvious that you can't smoothly
stack a closed space with an open one. We now set up an array of local (x,
y, z, t) coordinate systems centered on each event, in
which the three space axes lie in the 3-D slice of constant density (Fig. 1.8).
Consider the paths through space-time (world lines) of particles in a
small region of one slice. There will be be random motions, but we can take an
average to define a flow of matter through space-time. This flow must run along
the time axis we have set up -- matter must be on average stationary in space
-- otherwise the flow pattern in each slice would make the slices inhomogeneous
(unless the flow had the same speed and direction at every point, but that
would still be anisotropic). By definition the world lines of FOs follow this
average flow, and so are always perpendicular to the constant-density surfaces;
in other words a FO will always find herself surrounded by a constant-density
universe, and as Fig. 1.8
shows, will see her colleagues moving away from her according to Hubble's law.
Finally, all FOs must measure the same amount of time between different slices,
otherwise the rate of change of density would be different at different points
in the slice, contrary to homogeneity (it would also be impossible to stack the
slices perfectly if the gaps between them changed with position). If they can
agree on a standard starting point, such as the Big Bang, the FOs can then
define a cosmic time which is constant on each slice.
|
Figure 1.8: Space-time diagram of
homogeneous expansion. The curved lines represent the constant-density slices
of space-time. Two spatial axes are suppressed for simplicity. Coordinate
systems chosen so that the space (x) axis lies in the slices are shown at
selected points. The red arrows show the world lines of fundamental
observers, which are parallel to our local time axes if, as here, the slices
are homogeneous and self-similar. |
![\begin{picture}(12,5)
% put(0,0)\{ framebox(12,5)\{ \}\}
\put(0,0){\includegraphics*[width=12cm]{slices.eps}}
\end{picture}](node3_files/image027.gif)
This argument may seem subtle, but the bottom line
is simple: in cosmology it makes sense to separate "space" from
"time", despite the best efforts of relativity theory to blend them
together. In a very real sense, the absolute space and time of Isaac Newton are
restored (the very opposite of what Einstein was trying to achieve!). Of
course, we have relied on homogeneity and isotropy, which are only true on the
large scale. When we come to look at irregularities in the Universe, the
problem of separating space from time will recur.
We now have enough information to sort out the
mathematics of expanding, curved space, At the present cosmic time t0,
space has curvature k (= - 1, 0 or +1) and radius R0.
As the expansion is homogeneous, we know that at some other time t, all
distances have changed by a scale factor a(t). For a particular
circle (e.g. with us at the centre), the proper radius x becomes ax,
and the circumference becomes
 ,
,
Let's
define R(t) ![]() a(t)R0, and
replace the co-moving distance x by the co-moving
dimensionless quantity
a(t)R0, and
replace the co-moving distance x by the co-moving
dimensionless quantity
![]() .
.
This
is analogous to the polar angle ![]() in spherical polar coordinates. At any time t, the proper radius is R(t)
in spherical polar coordinates. At any time t, the proper radius is R(t)![]() and the circumference is 2
and the circumference is 2![]() rA = 2
rA = 2![]() R(t) Sk(
R(t) Sk(![]() ). The rôle of the
dimensionless scale factor a(t) has now been taken over by the length R(t) which is often called the radius of curvature of the universe. Notice that the sign of the curvature is fixed once
and for all: homogeneous expansion can't convert negative to positive
curvature, just as we found by thinking about stacking the slices in
space-time.
). The rôle of the
dimensionless scale factor a(t) has now been taken over by the length R(t) which is often called the radius of curvature of the universe. Notice that the sign of the curvature is fixed once
and for all: homogeneous expansion can't convert negative to positive
curvature, just as we found by thinking about stacking the slices in
space-time.
1.2.7 The light cone
A
central concept in relativity theory is the light cone
(Fig 1.9): the past light cone of an event is the surface
(actually 3-D) in space-time swept out by all the photons arriving at that
event, while the future light-cone is the surface swept out by all the photons
starting out at that event. Our world-line must be enclosed within the light
cone because we cannot overtake a photon. Notice that two observers moving
rapidly past each other would share the same light cone: the light cone for
each event is a fixed object in space-time, independent of coordinate systems
or frames of reference. Directions in space-time enclosed by the light cone are
called time-like and can be taken as the time axis for a coordinate
system, corresponding to the viewpoint of an observer whose world-line was in
that direction. Directions outside the cone are space-like.
The light-cone nicely illustrates the way that
observations in cosmology probe the history of the Universe, because photons
arriving now from objects far away must have started travelling towards us a
long time ago. These photons have travelled along our past light cone: only
this slice through space-time is accessible to observation, no matter how good
our telescopes become.
|
Figure 1.9: Space-time diagram (with the z
axis suppressed, i.e. held constant), showing the light cone. With two
spatial dimensions (x, y), the set of points at a given time t on the light
cone is a circle surrounding the observer; in 3-D it will of course be a
sphere. |
![\begin{picture}(13,10)
% put(0,0)\{ framebox(13,10)\{ \}\}
\put(0,0){\includegraphics*[width=13cm]{lightcone.eps}}
\end{picture}](node3_files/image033.gif)
1.2.8 The many distances of cosmology
Ask a cosmologist the distance to some galaxy and he is liable to reply "what kind of distance?". We have already met
- proper distance r(t) = R(t)
 (do you want the
value now, at t0,
or when the light was emitted, at tem?),
(do you want the
value now, at t0,
or when the light was emitted, at tem?), - co-moving distance x = R0.
- dimensionless
co-moving distance .
Two other kinds of distance are often used. The
radius of curvature of the sphere at co-moving distance ![]() is better known as
is better known as
- Angular size distance,
 .
.
As the
name suggests, this is the distance needed to convert from a measured angle ![]() across some distant
object to the physical size D perpendicular to the
line of sight:
across some distant
object to the physical size D perpendicular to the
line of sight:
D = rA![]()
Note
that D is measured along a circle that had radius r(tem) = R(tem) ![]() at the time the light was emitted.
at the time the light was emitted.
The last kind of distance comes from astronomers'
habit of using the inverse-square law for brightness to infer distances. In a
non-expanding Euclidean space, the apparent brightness or flux density S
of an object at distance r is related to the intrinsic brightness or luminosity
L by
![]()
because
the light from the object is now spread over a sphere of area 4![]() r2. In an expanding universe, photons are
redshifted,
r2. In an expanding universe, photons are
redshifted, ![]()
![]() (1 + z). A photon has energy E = hc/
(1 + z). A photon has energy E = hc/![]() , where h is Planck's constant,
so the redshift reduces the energy by a factor (1 + z). Also, the rate of arrival is reduced: consider two
photons heading in the same direction emitted a time dt apart. At first they will be separated by dl = cdt, but the expansion of
the universe increases this to (1 + z)dl on arrival; so the arrival rate is reduced by (1 + z). As we have seen, the (present) area of a sphere with
a co-moving radius
, where h is Planck's constant,
so the redshift reduces the energy by a factor (1 + z). Also, the rate of arrival is reduced: consider two
photons heading in the same direction emitted a time dt apart. At first they will be separated by dl = cdt, but the expansion of
the universe increases this to (1 + z)dl on arrival; so the arrival rate is reduced by (1 + z). As we have seen, the (present) area of a sphere with
a co-moving radius ![]() is
is ![]() . Combining all these, the formula for flux density is
. Combining all these, the formula for flux density is
![]() .
.
For convenience, we write this as
![]()
where
- Luminosity distance
 .
.
We can
use the formulae for angular size and luminosity distance to see how surface
brightness depends on distance. Surface brightness (or intensity) is the
flux density per unit solid angle, i.e. area on the sky. A small square
region with angular size in ![]() each direction will have solid angle
each direction will have solid angle ![]() , corresponding to a cross-sectional area A = D2
at the source. The observed surface brightness Iobs is
related to the emitted brightness Iem = L/(4
, corresponding to a cross-sectional area A = D2
at the source. The observed surface brightness Iobs is
related to the emitted brightness Iem = L/(4![]() A)
by
A)
by

This
is called cosmological surface brightness
dimming. Notice that it depends only
on the redshift, not on the geometry of the universe or the present scale size.
Going as the fourth power of (1 + z), it is a strong
effect; it makes galaxies at large redshift much harder to see than might be
expected.
|
|
|
Figure 1.10: Plot of angular size distance,
luminosity distance and |
![\begin{picture}(12,9.2)
% put(0,0)\{ framebox(12,9.2)\{ \}\}
\put(0,9.2){\includegraphics*[height=12cm,angle=-90]{lengths.eps}}
\end{picture}](node3_files/image055.gif)
%20equivalent%20to%20our%20cylinder,%20as%20we%20will%20see.%20%3cDIV%20ALIGN=CENTER%3e%3cBR%3e%3cIMG%20WIDTH=540%20HEIGHT=270%20ALIGN=BOTTOM%20BORDER=0%20SRC=cosmology/ansimg1.gif%3e%3cBR%3e%3c/DIV%3eAs%20before,%20there%20are%20only%20two%20people%20here.%20Suppose%20the%20woman%20goes%20for%20a%20walk,%20as%20shown.%20%20From%20the%20point%20of%20view%20of%20the%20repeating%20pattern,%20the%20central%20man%20sees%20copy%20A%20of%20the%20woman%20leave%20to%20his%20lower%20right,%20but%20shortly%20after,%20copy%20B%20passes%20by%20from%20his%20upper%20left.%20An%20equal%20time%20interval%20later,%20copy%20C%20arrives%20from%20his%20lower%20left.%20%20%3cP%3eNow%20consider%20our%20cylinder,%20which%20consists%20of%20the%20dash-dot%20square.%20The%20scale%20bar%20shows%20the%20angle%20around%20the%20cylinder,%20which%20I\'ll%20call%20longitude:%20as%20the%20top%20and%20bottom%20edges%20are%20joined,%200%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e%20=%20360%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e.%20%20The%20woman%20is%20standing%20at%20a%20longitude%20of%20about%2090%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e.%20If%20we%20had%20joined%20the%20cylinder%20up%20as%20a%20torus,%20if%20the%20woman%20walks%20along%20the%20cylinder%20her%20longitude%20will%20stay%20the%20same,%20so%20she%20will%20return%20from%20the%20left%20also%20at%20longitude%2090%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e,%20as%20in%20%3cI%3eAsteroids%3c/I%3e.%20%20But%20if%20we%20make%20a%20180%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e%20twist%20before%20joining%20the%20ends,%20when%20she%20leaves%20the%20right%20side%20at%20longitude%2090%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e,%20she%20will%20return%20at%20longitude%2090%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e%20+%20180%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e%20=%20270%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e,%20i.e.%20at%20position%20B.%20(If%20you%20try%20to%20visualize%20this,%20I%20suggest%20you%20imagine%20a%20long%20thin%20cylinder,%20rather%20than%20a%20square%20one!).%20In%20turn,%20when%20she%20crosses%20the%20cylinder%20again%20and%20leaves%20the%20right-hand%20edge%20at%20longitude%20270%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e,%20she%20will%20return%20on%20the%20left%20edge%20at%20longitude%20270%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e%20+%20180%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e%20=%20450%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e%20%3cIMG%20WIDTH=16%20HEIGHT=13%20ALIGN=BOTTOM%20SRC=ansimg2.gif%3e%2090%3cSUP%3e%3cTT%3eo%3c/TT%3e%3c/SUP%3e,%20i.e.%20at%20position%20C.%3cP%3eIn%20other%20words,%20the%20connectivity%20of%20the%20twisted%20cylinder%20is%20the%20same%20as%20the%20diamond%20repeat%20pattern,%20as%20I%20claimed.',650,400)){kind=link}
Answers to questions
1. Convince
yourself that a repeating pattern like that in Fig. 1.7, except with a diamond instead of a rectangular
basic unit, would be caused if a cylinder was twisted by 180o around its axis before joining the two ends.
Answer to question
A diamond repeating pattern is shown below, as before outlined with a dashed line. I have also drawn in a square cut (dot-dashed rectangle) equivalent to our cylinder, as we will see.
As before, there are only two people here. Suppose the woman goes for a walk, as shown. From the point of view of the repeating pattern, the central man sees copy A of the woman leave to his lower right, but shortly after, copy B passes by from his upper left. An equal time interval later, copy C arrives from his lower left.
Now consider our cylinder, which consists of the dash-dot
square. The scale bar shows the angle around the cylinder, which I'll call
longitude: as the top and bottom edges are joined, 0o
= 360o. The woman is standing at a longitude of about 90o.
If we had joined the cylinder up as a torus, if the woman walks along the
cylinder her longitude will stay the same, so she will return from the left
also at longitude 90o, as in Asteroids. But if we
make a 180o twist before joining the ends, when
she leaves the right side at longitude 90o, she will
return at longitude 90o + 180o
= 270o, i.e. at position B. (If you try to visualize
this, I suggest you imagine a long thin cylinder, rather than a square one!).
In turn, when she crosses the cylinder again and leaves the right-hand edge at
longitude 270o, she will return on the left edge at
longitude 270o + 180o =
450o ![]() 90o,
i.e. at position C.
90o,
i.e. at position C.
In other words, the connectivity of the twisted cylinder is the same as the diamond repeat pattern, as I claimed.