Supplementary Material
to:
An Introduction to Radio Astronomy
4th edition Cambridge University Press 2019
Last updated 1/07/2019
Chapter 7: Spectrometers and Polarimeters
Autocorrelation
Spectrometers: revisited
Autocorrelation is most often used in the analysis of “noisy”
data containing some suspected periodicities with low signal-to-noise ratio –
this is just what a spectral line “buried” in system noise is – some
frequencies contribute a little more power than others. The ACF is a measure of
how predictable a function is at (t + τ) , i.e. a version delayed by τ,
compared with the function at t.
In Section 7.3 we outline the basis of practical digital autocorrelation
spectrometers (ACS) but experience tells us that this process can be hard to
understand at first sight. In this section we take a second look at how the ACF
is formed from digitized data (see Appendix 3) with samples separated by time intervals ![]() t.
t.
We start by
outlining the most obvious approach (as in Section 7.2) which is not, in
practice, used.
The TxN approach
·
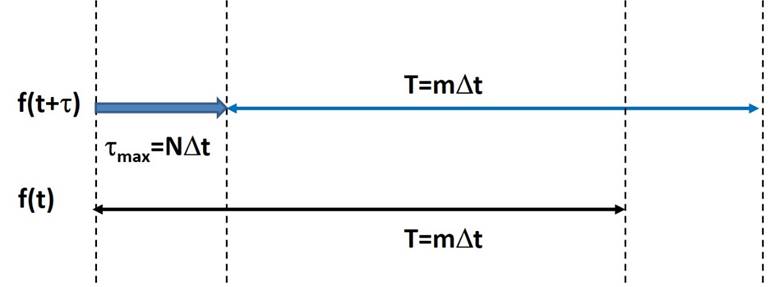
As described in section 7.2 we start with f(t), comprising m
samples over a time span T=m![]() t and then:
t and then:
o
Cross-multiply, point by point, the m samples of f(t)
with the m samples of f(t+![]() τ) which have been shifted by a
time
τ) which have been shifted by a
time ![]() τ [an integer number x sampling
interval
τ [an integer number x sampling
interval ![]() t].
t].
o
Adding up the results of the point-by-point multiplications over all T
and averaging them together. This forms one point in the ACF.
o
Repeating the process N times with increasing time shifts taking
the total shift of f(t+τ) out to N![]() t = τmax as in the diagram below. Note that N<<m.
t = τmax as in the diagram below. Note that N<<m.
o
The number of digital
operations is proportional to NxT
· This approach is like a digital version of a Michelson spectral
interferometer; it effectively requires manipulating two extended data sets (in
order to achieve the desired signal-to-noise ratio) plus the ability to cross-multiply
them and add up the results for a set of
delay steps (shifts or “lags”) to cover the range out to τmax.
It would require lots of specialised digital hardware.
In the practical numerical simulation shown in
the diagram below (and also for a longer time series in Fig 7.3) N is not <<m
and the decay (decorrelation) seen in the ACF magnitude is only due
to the finite length of f(t) – which limits the extent of the overlap
between the function and the shifted version (see the diagram above). This
“window” limits the resolution of the retrieved frequency after Fourier
Transformation. In a real observation decorrelation in the ACF also arises from
the finite width of the spectral line.
In the time domain a narrow spectral line is a quasi-sinusoidal signal
which less and less resembles a time-shifted copy of itself; the decorrelation timescale
is proportional to (1/linewidth).

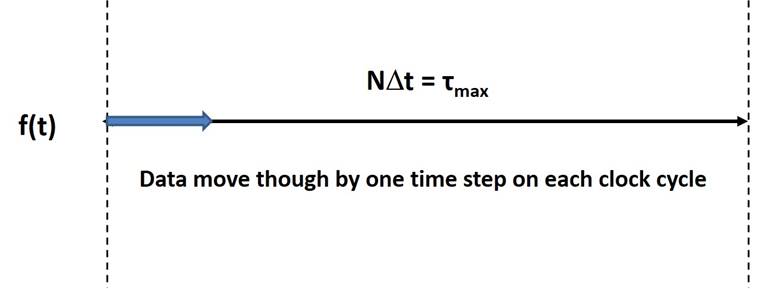
The NxT approach
A more practical approach involves reversing the order of N and T.
Now one stores one continuously updated set of N samples f(t)
covering the maximum time delay τmax. Since N<<m the amount of data
stored is much less than in the first approach. After each time step ![]() t the samples move
along by 1 through the “window” (a digital delay line) defining f(t) i.e.
t the samples move
along by 1 through the “window” (a digital delay line) defining f(t) i.e.
The ACF is formed by:
· Cross multiplying the
first sample of f(t) with each of the other N samples in turn out
to τmax this gives an estimate of the
complete ACF out to τmax at one go. We are still seeing how the
signal (albeit now only one sample of it) compares with shifted versions i.e.
the other samples in f(t).
o
Repeat the process after the next clock cycle i.e. multiply
the new first sample with the others to form a new estimate of the complete ACF
and add it to the first one. The signal-to-noise ratio of the co-added ACF will
improve.
o
Keep repeating the process for m
clock cycles i.e.
for an extended time period. With the
same number of
operations, proportional to (N x T), as
in the first approach the ACF builds up to the same signal/noise ratio.
·
Since we are working with many
fewer data at any given time this method is more efficient in terms of digital
electronics. It is used in all DACS.

Outline of the
digital architecture (see also Fig 7.1)

·
In the simplest digital system single bit samples
(0,1) are fed into a digital delay line ( a “shift
register“) storing the sampled input
signal f(t) – out to N shifts (or “lags”)
·
At a given time the state (0 or 1) of each stage in
the shift register is compared to that of the 1st(zero shift) stage. If both the same (0 or 1): comparator yields 1. If they are different the comparator yields 0; the result
added into counter for each shift.
·
On the next clock pulse all samples move along by one in
the shift register and the process is repeated up to the chosen integration
time (m time steps). The contents of the counters then form the sampled
ACF.
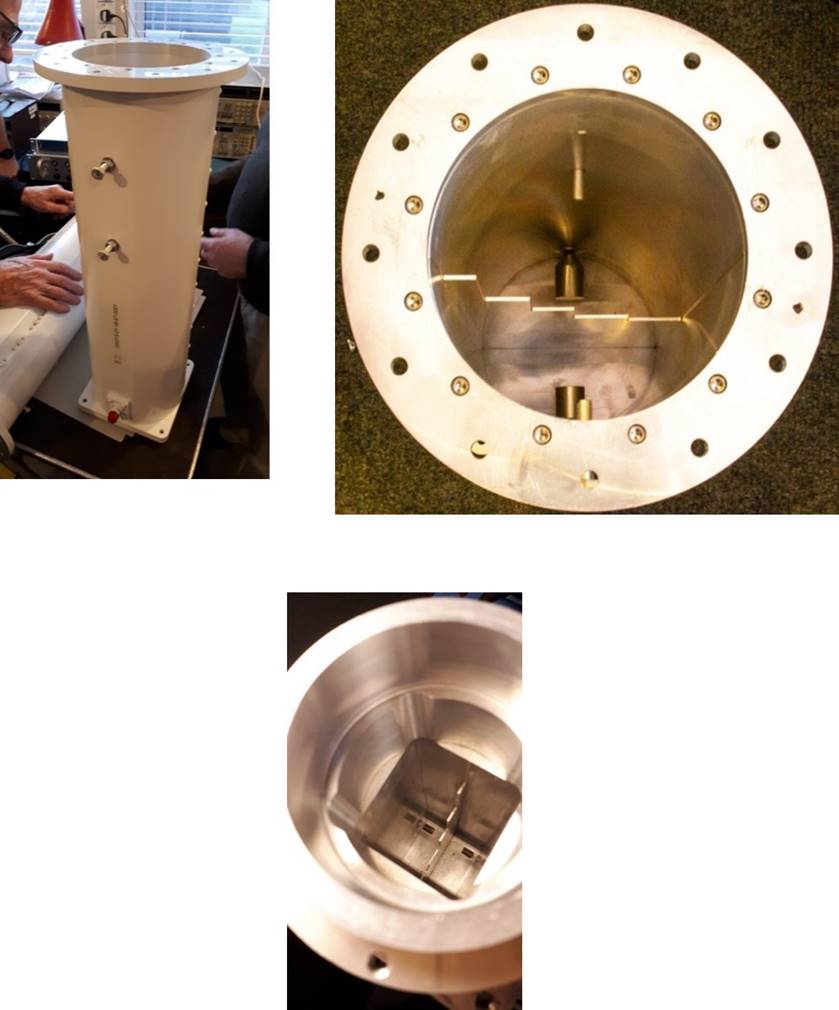
Septum plate polarization
splitters
Septum plate polarizers (IRA4 Section 7.5). There are several ways to extract orthogonal polarizations from a symmetrical waveguide feed. The septum plate is widely used to produce the hands of circular polarisation due to its compactness, albeit at the expense of bandwidth. The top figure shows a septum polarizer in a circular waveguide optimized for the band 1400-1427 MHz (credit: Phase2 Microwave). The figure below shows a septum plate polariser in a square waveguide optimised for C-band operation – the section above the septum converts the waveguide cross-section from square to circular.